埔慧君埔慧科技

随着人工智能和机器人技术的飞速发展,触觉传感器正逐渐成为机器人领域的一项关键技术。东吴证券在其近期发布的《传感器行业深度报告:触觉提升机器人现实感知能力,打通灵巧操作关键一环》中指出,触觉传感器不仅是人形机器人实现精准操作的核心部件,更是推动机器人从实验室走向商业化落地的关键因素。
触觉传感器:机器人的“皮肤”与“手指”
触觉传感器是用于机器人中模仿触觉功能的传感器,能够感知末端力、温度、湿度等信息。按功能可分为接触觉传感器、力矩传感器、压觉传感器和滑觉传感器等。
在人形机器人中,触觉传感器主要分布在躯干和灵巧手等部位,其中灵巧手指尖的传感器是核心部位。指尖触觉传感器强调感知与控制一体化,最重要的特性是对三维力的感知,能够实现不同手指的分布式协同工作,从而提升机器人在抓握动作中的稳定性和灵活性。
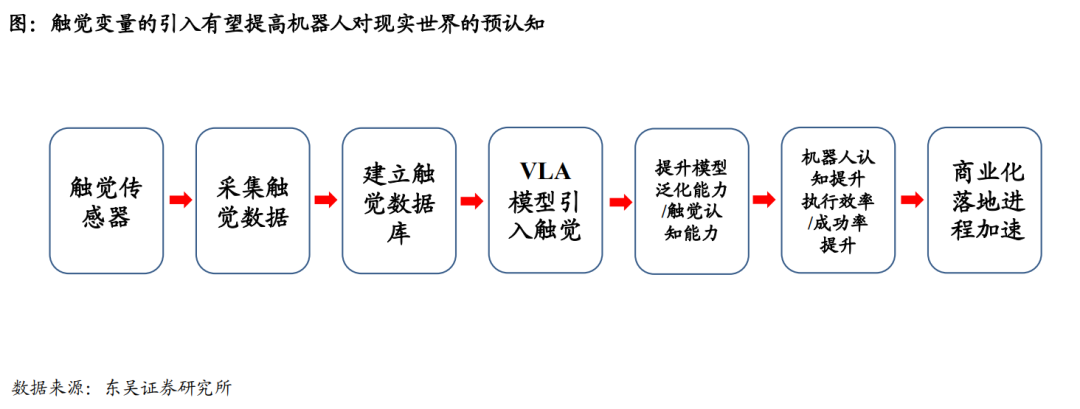
触觉变量的引入有望提高机器人对现实世界的预认知,触觉传感器系人形机器人实现泛化操作的核心部件。
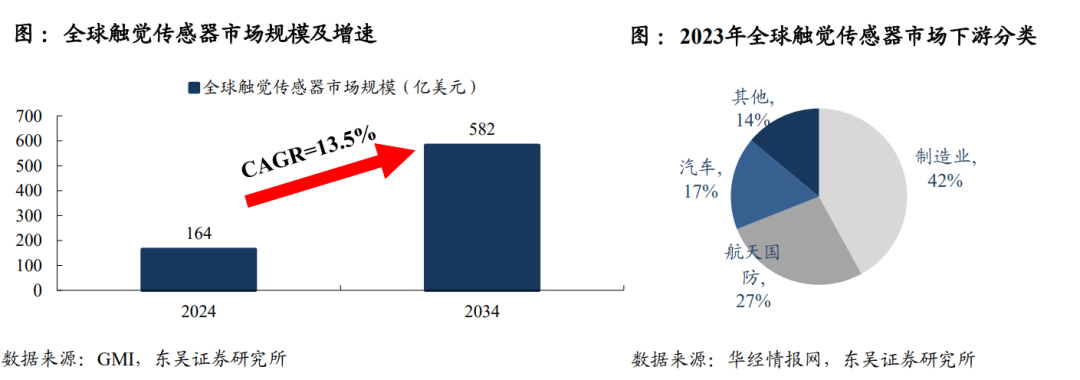
市场规模
据GMI报告,2024年全球触觉传感器市场规模已达164亿美元,预计未来十年将以13.5%的年复合增长率持续扩张。
东吴证券测算,预计至2035年,全球人形机器人用电子皮肤&触觉传感器市场空间可达175亿元。
技术路线
目前主流的触觉传感器技术包括:
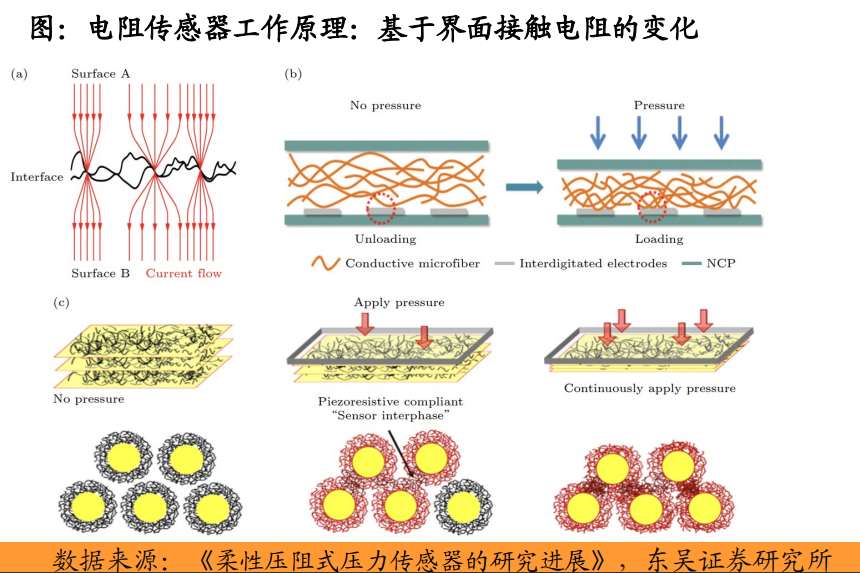
压阻传感器:其原理为力作用在导电材料(如导电橡胶、导电布、碳纳米管复合物)上时,会改变其电阻值。传感器通过检测电阻变化来反映外部压力或接触状态的变化。
视触觉传感器:基于视觉的触觉感知装置,能够同时感知法向力、切向力、相对滑动和物体的位姿等多维信息,其原理为利用软胶材料来接触物体,根据物体形变的大小反推力的大小。
电容传感器:其原理为基于电容的存储能力随外部刺激引起的响应而变化,在外力作用下使两极板间的相对位置发生变化,从而导致电容变化,通过检测电容变化量来获取受力信息。电容传感器能够测量三维力,并具有接近觉。
压电式传感器:原理为利用压电效应,即在外力作用下,某些特定材料内部会产生极化,形成不同的极距,并出现与材料表面相反的电荷。
磁电式传感器:利用电磁感应原理,将输入运动速度变换成感应电势输出的传感器,可分为基于霍尔干扰和基于霍尔器件两种路线。
未来
触觉传感器行业目前仍处于快速发展阶段,市场竞争格局尚未完全固化。未来,随着人形机器人技术的不断进步,触觉传感器的应用场景将不断拓展。从工业制造到医疗、消费电子、养老护理等领域,触觉传感器都将发挥重要作用。此外,随着产量的提升,触觉传感器的成本有望下降,从而进一步推动其在大众市场的普及。
触觉传感器正在成为机器人产业的“新引擎”,它不仅赋予了机器人更接近人类的感知能力,还为未来的智能化生活带来了无限可能。让我们拭目以待,触觉传感器将如何改变我们的世界!
来源:东吴证券《触觉提升机器人现实感知能力 指尖触觉传感器将成技术突破重点》。
声明:若有来源标注错误或侵犯了您的合法权益,请联系更正或删除。